

Noridc nRF52 PWM
Nordic 的 nRF52 系列芯片除了基本的蓝牙能力非常出色之外,也配备了很多性能不错的外设,比如这次探讨的 PWM 模块。PWM 是日常生活中无处不在的存在,比如对灯的亮度调节、电机的转速,任何需要做「限流」的场景都有着 PWM 的身影。
后文的所有代码及示例如无特别说明都是基于 nRF52840 来测试运行,一般来说在诸如 nRF52832 nRF52833 这些芯片上也能完整运行。
PWM 模块介绍
PWM 模块共有 4 组,分别是 PWM0 PWM1 PWM2 PWM3,如果使用的是 SoftDevice 模式开发,需要在 sdkconfig.h 文件中开启对应的 enable 宏,如果是在 Zephyr OS 下开发,也只需要在 proj.conf 文件中配置如 CONFIG_NRFX_PWM0=y 即可。
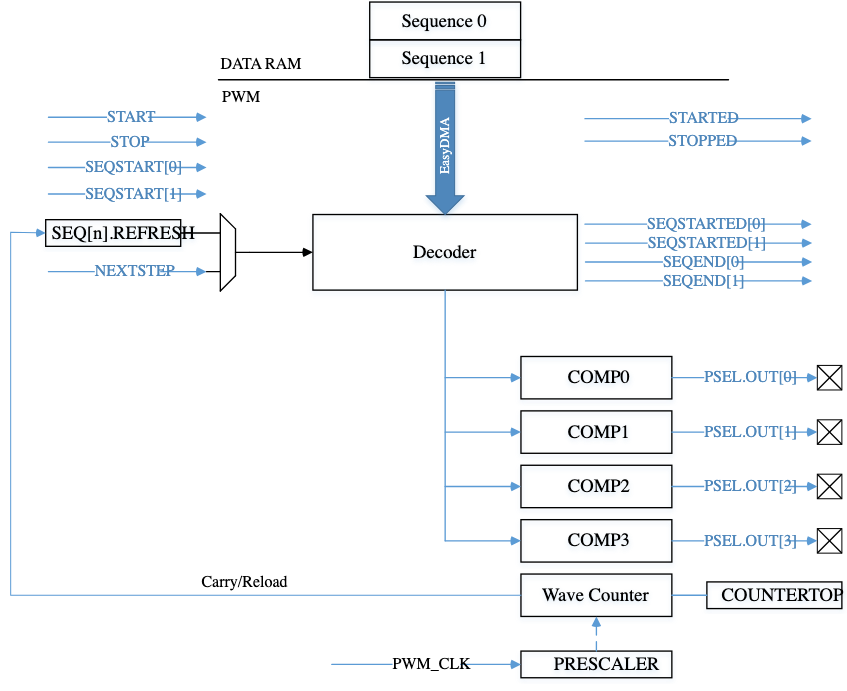
其中每一组都分别有 4 个通道 (channel) 可以独立配置 PWM 的输出,也就是说这块芯片可以最大支持 4x4=16 路的 PWM 输出,每一路都可以独立配置占空比 (Duty),每一个模块都可以配置不同的 PWM 频率及运行优先级。为了更好地理解 Noridc 这套东西是如何运作的,我们先引入一个基本概念:Wave Counter (波形计数器):
nRF52 的波形计数器有两种类型:Up Mode Up & Down Mode,如下图所示:
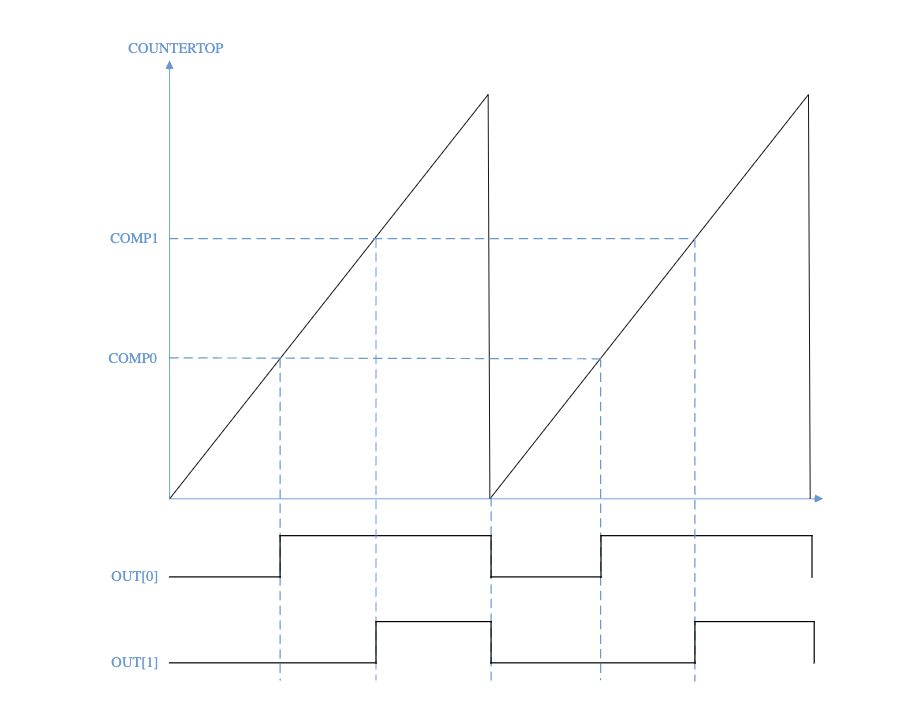 Up Mode
Up Mode
这里的 OUT[x] 表示配置的 GPIO 口输出的高低电平信号,CMPx 表示计数器的比较值,COUNTERTOP 表示计数器目标值(可以比作 PWM 的周期参数)。可以看到,在 Up Mode 模式中输出的信号与在 Up & Down Mode 中输出的结果占空情况有所不同,大多数情况下我们只需要使用 Up Mode 即可,很少部分可能会用到第二种模式。
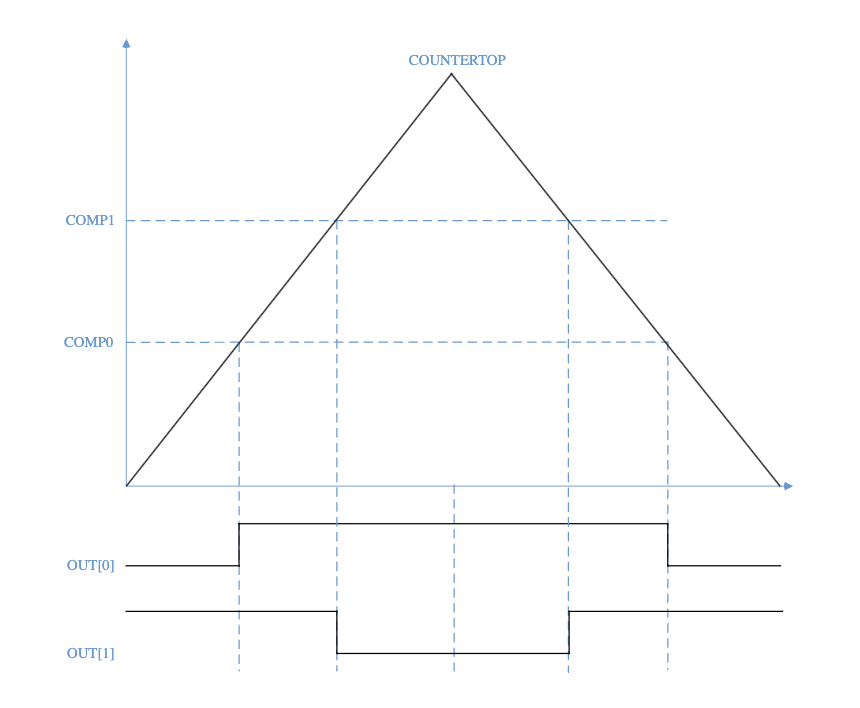 Up And Down Mode
Up And Down Mode
示例
我们来看一段简单的示例代码:
/**
* #include <nrfx_pwm.h>
* #define PIN_OUT1 xx // GPIO
*/
/* instance */
static nrfx_pwm_t m_pwm0 = NRFX_PWM_INSTANCE(0);
/* init */
uint32_t period_us = 1000;
nrfx_pwm_config_t config = {
.output_pins =
{
PIN_OUT1, // channel 0
NRF_PWM_PIN_NOT_CONNECTED, // channel 1
NRF_PWM_PIN_NOT_CONNECTED, // channel 2
NRF_PWM_PIN_NOT_CONNECTED, // channel 3
},
.irq_priority = 2,
.base_clock = NRF_PWM_CLK_1MHz,
.count_mode = NRF_PWM_MODE_UP, // Up Mode
.top_value = period_us, // COUNTERTOP
.load_mode = NRF_PWM_LOAD_COMMON, // 波形模式:4 个 channel 完全一致
.step_mode = NRF_PWM_STEP_AUTO
};
nrfx_err_t err_code = nrfx_pwm_init(&m_pwm0, &config, NULL, NULL);
/* config pwm duty */
/* 注意!这里必须加 static,因为 nRF PWM 会在 RAM 中加载 duty 配置,所以该内存不能在函数执行后释放 */
static nrf_pwm_values_common_t dutys[1];
/* 考虑使用 Up Mode,所以在比较曲线上升的时候 OUT[0] 会在 200 时刻变换信号,换算为占空比(低电平为空)便是 80% */
/* duty = (1000 - 200) / 1000 = 80% */
/* 如果要输出相反的高低电平信号,设置符号位为 1 即可,即:dutys[0] = 200 | 0x8000; */
dutys[0] = 200;
nrf_pwm_values_t values = {
.p_common = dutys,
};
nrf_pwm_sequence_t sequence = {
.values = values,
.length = NRF_PWM_VALUES_LENGTH(dutys),
.repeats = 0,
.end_delay = 0,
};
uint16_t repeat_count = 666; /* repeat this signal 666 times */
/* start pwm */
uint32_t task_address = nrfx_pwm_simple_playback(&m_pwm0, &sequence, repeat_count, NRFX_PWM_FLAG_STOP);
PWM 的 load mode 有 4 种,上述使用的是第一种 (common 模式),一般来说上述代码便已经满足了大多数场景下 PWM 的使用,比如电机驱动、占空波形发生等。但为了充分使用 nRF52 的 PWM 模块,我们再细说一下其余三种模式: grouped individual wave form.
Load Mode
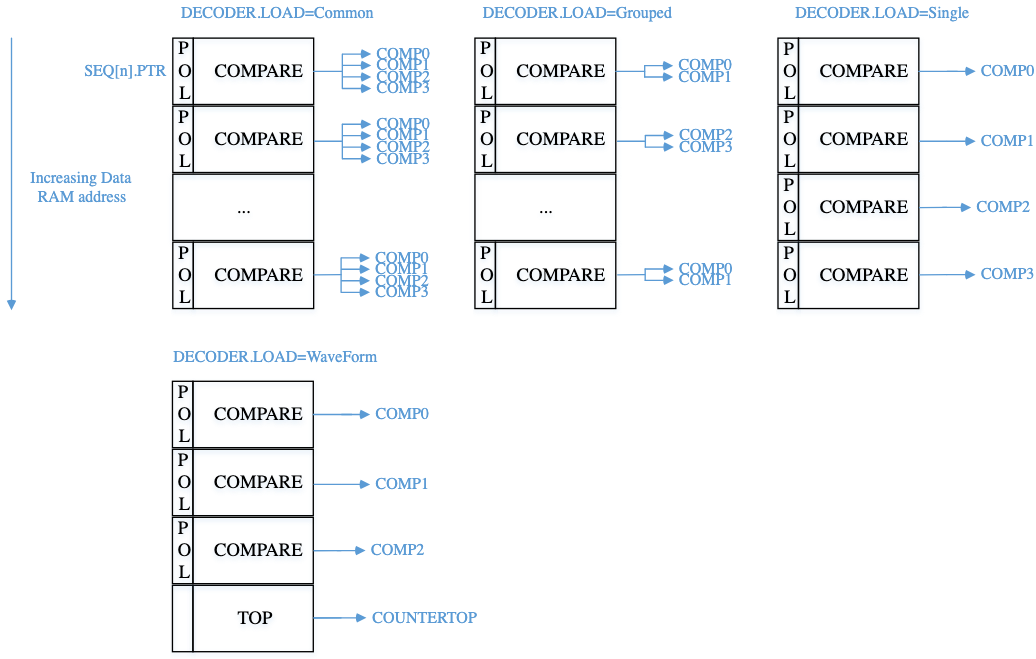
这 4 种不同的加载模式其实都是使用一个 COMPARE 来完成的,并同步从 RAM 中加在下一个 COMPARE 值对应的占空比数据,然后输出给不同的通道。我们以一个简单的序列举例:
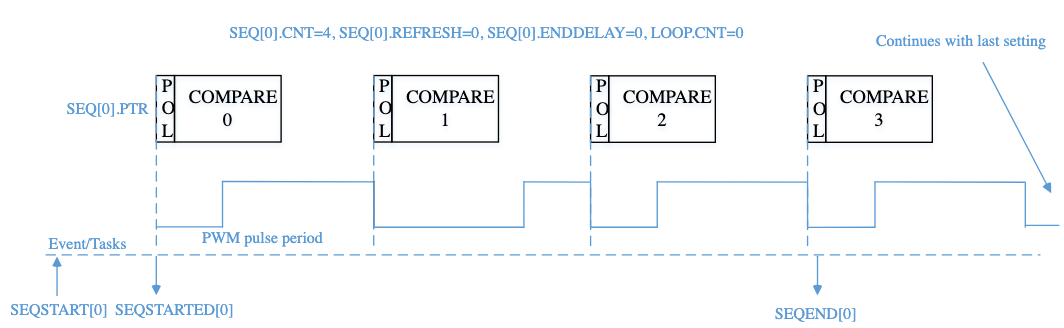
从图中可知道每次 COMPAREx 触发后都相当于一次新的 PWM 周期,然后会读取 RAM 里存储的 dutys 值后进行占空比设置。
Grouped Mode
在 Grouped Mode 下,只需要修改占空比的参数即可:
// 配置 config 处需要修改:
.output_pins =
{
PIN_OUT1, // channel 0
NRF_PWM_PIN_NOT_CONNECTED, // channel 1
PIN_OUT2, // channel 2
NRF_PWM_PIN_NOT_CONNECTED, // channel 3
},
// ...
static nrf_pwm_values_grouped_t dutys[1];
dutys[0].group_0 = 200; // channel 0, 1
dutys[0].group_1 = 800; // channel 2, 3
nrf_pwm_values_t values = {
.p_grouped = dutys,
};
// ...
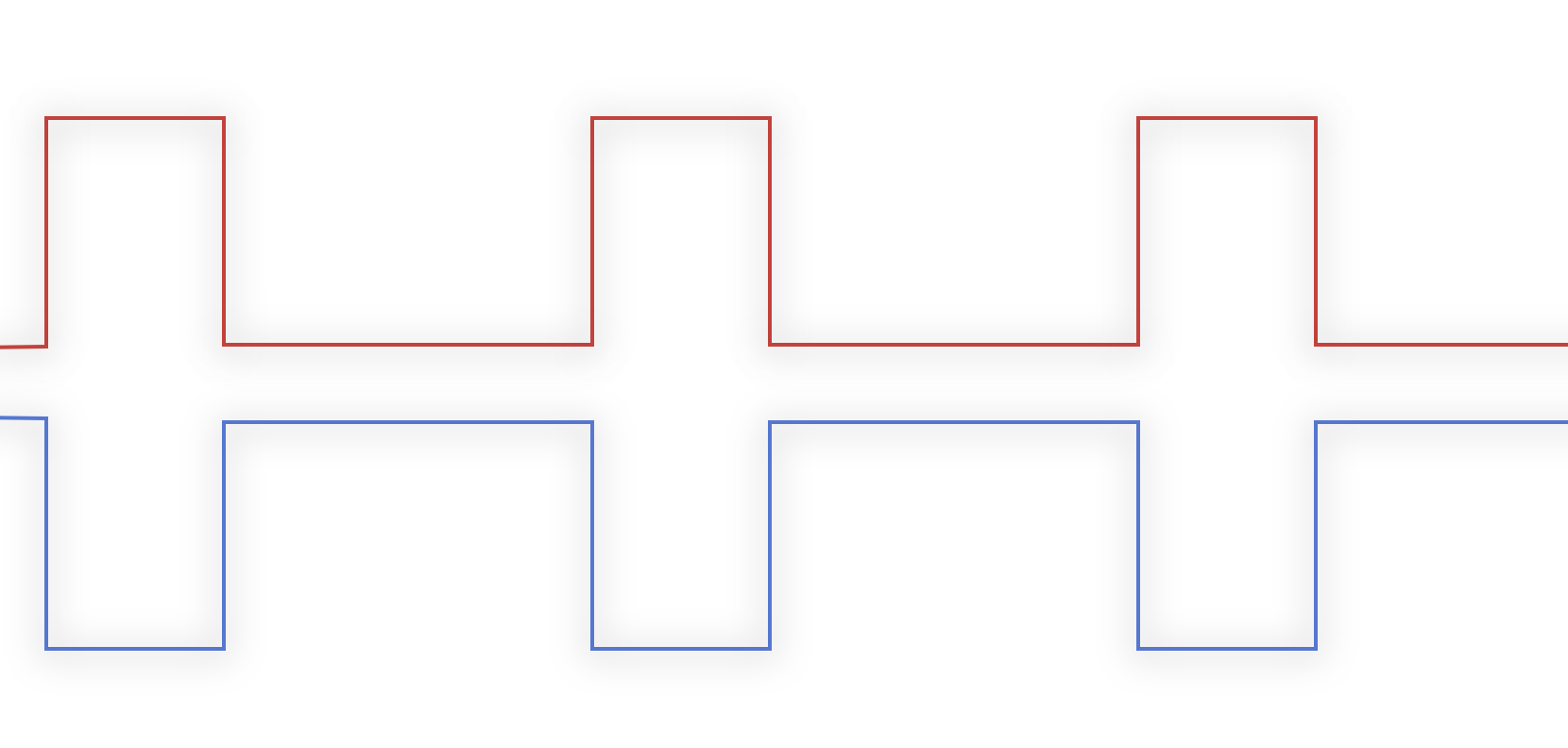
这段代码运行结果会是一个互补的方波交替前进,如下图所示:
Individual Mode
这个模式可以完整控制任何一路的 PWM 占空比输出,示例代码如下:
// 配置 config 处需要修改:
.output_pins =
{
PIN_OUT1, // channel 0
PIN_OUT2, // channel 1
PIN_OUT3, // channel 2
PIN_OUT4, // channel 3
},
// ...
static nrf_pwm_values_individual_t dutys[1];
dutys[0].channel_0 = 200; // channel 0
dutys[0].channel_1 = 800; // channel 1
dutys[0].channel_2 = 200; // channel 2
dutys[0].channel_3 = 800; // channel 3
nrf_pwm_values_t values = {
.p_individual = dutys,
};
// ...
Wave Form Mode
波形模式的示例代码同上述类似,我们可以看一下它的结构体:
typedef struct {
uint16_t channel_0; ///< Duty cycle value for channel 0.
uint16_t channel_1; ///< Duty cycle value for channel 1.
uint16_t channel_2; ///< Duty cycle value for channel 2.
uint16_t counter_top; ///< Top value for the pulse generator counter.
} nrf_pwm_values_wave_form_t;
与 nrf_pwm_values_individual_t nrf_pwm_values_grouped_t nrf_pwm_values_common_t 不同的是,nrf_pwm_values_wave_form_t 除了不同 channel 的设定值外,还可以设置 counter_top 参数,用户就可以实时改变周期来进行更多功能的开发。
尾
Nordic nRF52 系列是一个经典系列,帮助诞生了很多尺寸非常小巧同时功能又很强大的应用产品。它的 PWM 模块支持最多 16 路高精度的独立控制,用来做近距离(蓝牙范围内)的飞控或桌面级的无线控制微型机器人都是非常不错的选择。
如果对此文有任何疑问或新的理解可以联系作者邮箱建立沟通 🙂